- 센서배치 최적화 시뮬레이션
- 다중센서 시공간 캘리브레이션
- 엣지 인프라 영상 기반 객체(종류, 위치) 검출
- CARLA 엔진 기반의 자율주행환경 시뮬레이션
- CCTV 비디오 기반의 교통주행상황 3D 재현
- 이동형 엣지 인프라 제작
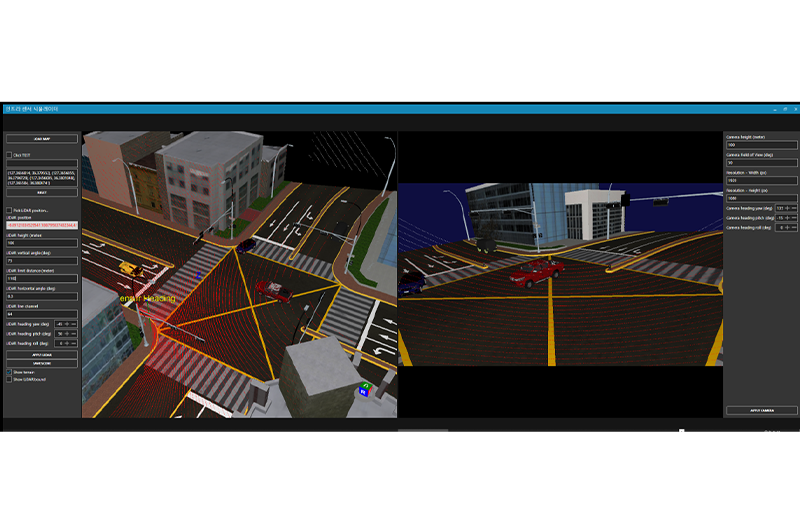 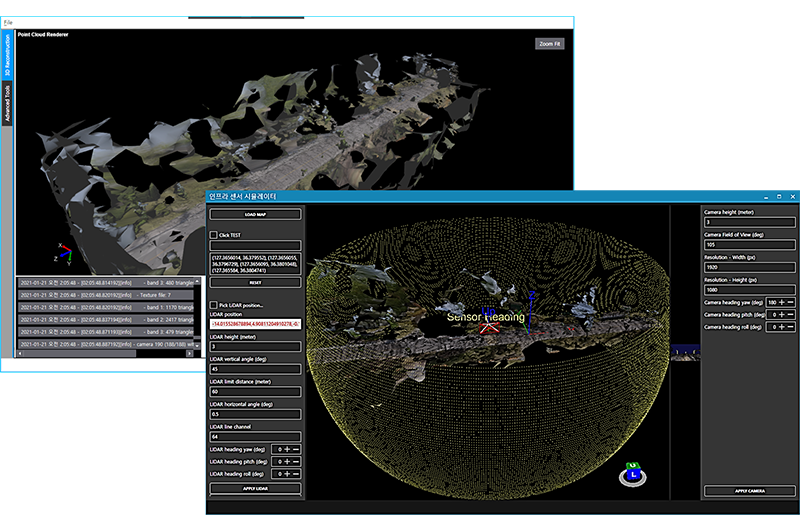 |
센서배치 최적화 시뮬레이션
엣지 인프라에 다중센서(카메라, 라이다, 레이다) 설치시 최적의 설치위치 방향을 찾기 위한 시뮬레이션 도구 |
|---|---|
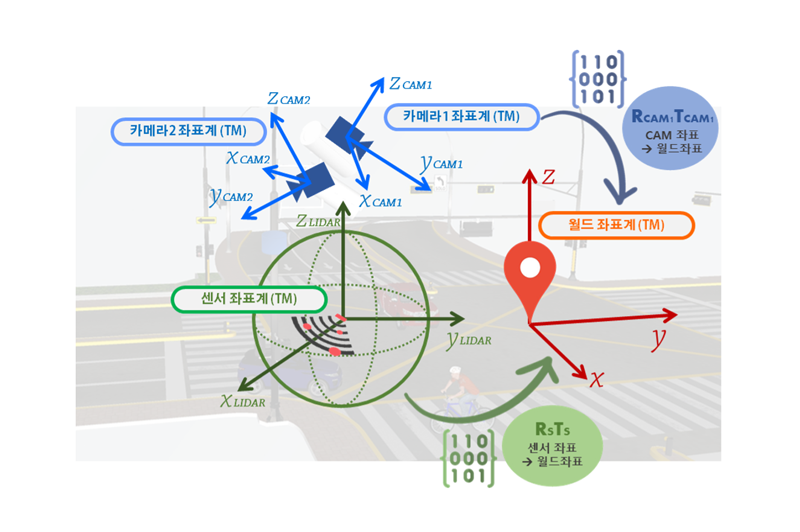  |
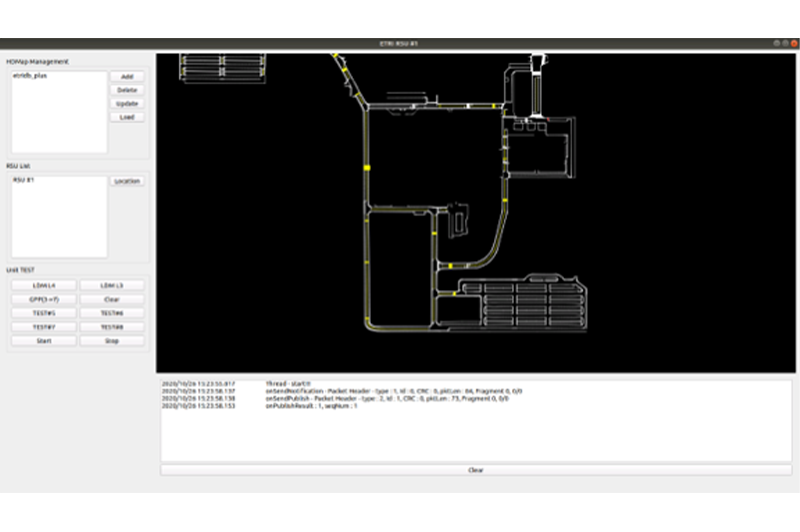
다중센서 시공간 캘리브레이션
카메라, 라이다, 레이다 등 엣지에 여러종유의 센서를 설치할 경우, 공간적으로 TM World좌표 기준의 센서의 설치위치, 센싱방향을 탐지하기 위한 보정기술. 또한 카메라-라이다의 데이터 동기화를 위한 시간 보정 및 프레임 획득 기술 |
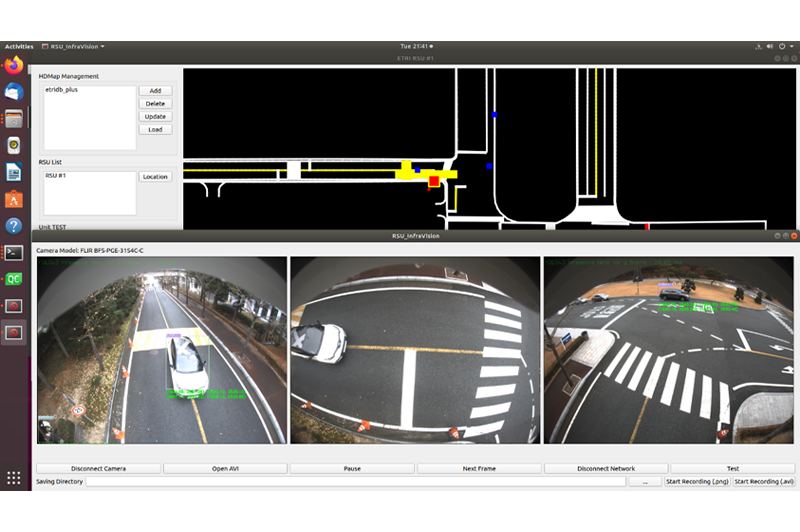  |
엣지 인프라 영상 기반 객체(종류, 위치) 검출
Yolo v3을 이용하여 학습된 객체에 대한 실시간 인식 및 위치 추적/검출 |
|
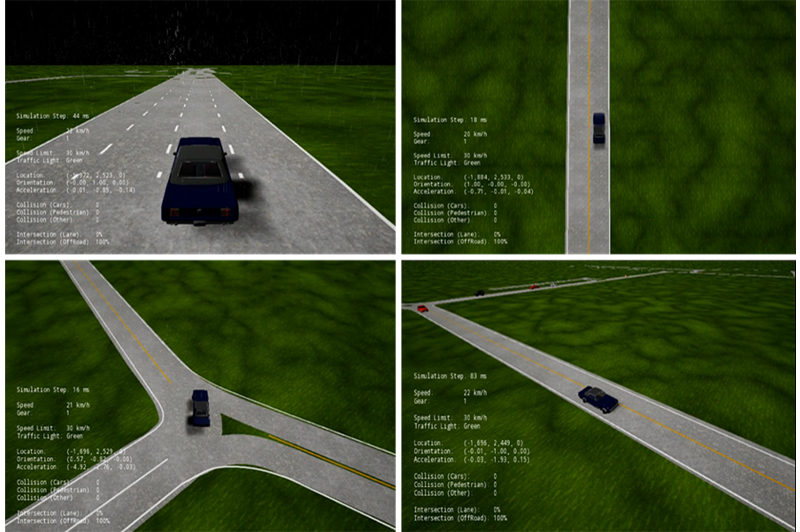
CARLA 엔진 기반의 자율주행환경 시뮬레이션
고정밀 맵을 3D 모델링하여 자율주행환경을 구축하고, Carla 엔진을 이용하여 실제 주행시험을 모사하는 기술. 실차의 제어파라메타를 반영하여 자율주행 도로 및 차량 제어를 사전에 점검하는데 활용함. |
  |
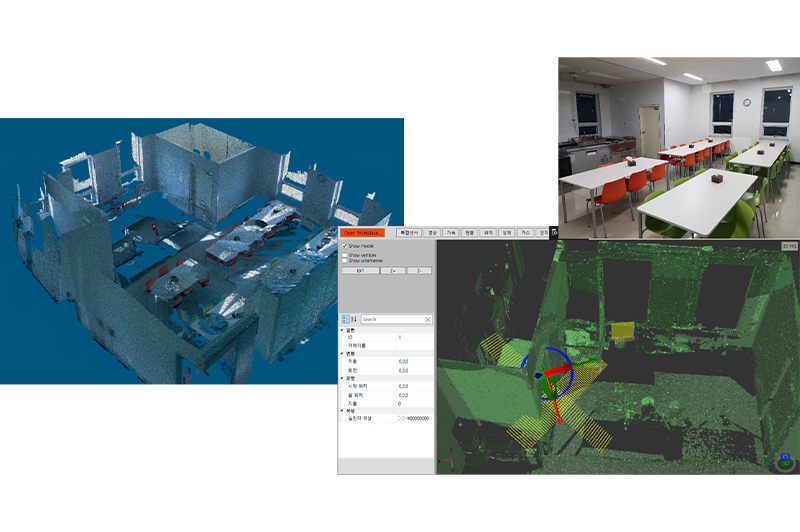
CCTV 비디오 기반의 교통주행상황 3D 재현
여러대의 CCTV의 카메라에 촬영된 영상을 카메라 촬영위치, 카메라 촬영방향을 다시점 영상처리술로 추출하고, 촬영된 차량의 절대좌표도 모두 다시점 영상처리 기술로 찾아내여 차량별 이동경로를 추적하여 3D 시뮬레이션으로 재현하는 SW 교차로 등에서 교통사고 발생시, CCTV를 영상을 통한 3차원 사고상황 재현가능 |
   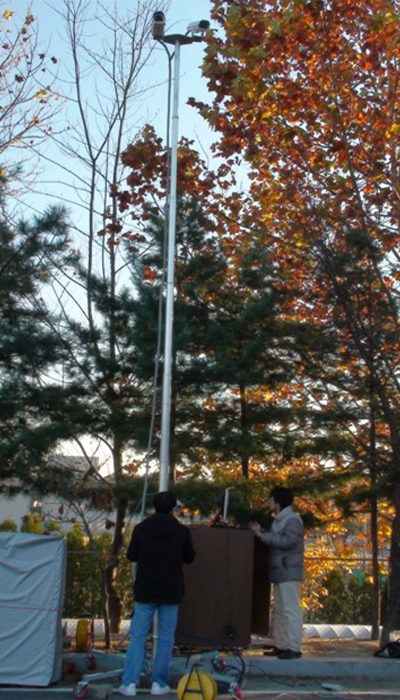 | -->
이동형 엣지 인프라 제작
엣지 인프라에 센서 설치하기 전에 사전에 검증하기 용도로 활용 |